
目录
- 遍历
- 广度优先搜索BFS(Breadth First Search)
- 深度优先搜索DFS(Depth First Search)
- AOV网(Activity On Vertex Network)
- 拓扑排序(Topological Sort)
遍历
图的遍历
从图中某一顶点出发访问图中其余顶点,且每一个顶点仅被访问一次
图有2种常见的遍历方式(有向图、无向图都适用)
广度优先搜索(Breadth First Search,BFS),又称为宽度优先搜索、横向优先搜索
深度优先搜索(Depth First Search,DFS)
发明“深度优先搜索”算法的2位科学家在1986年共同获得计算机领域的最高奖:图灵奖
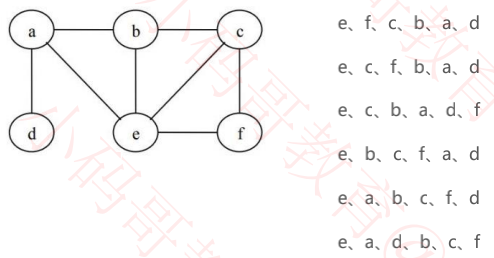
广度优先搜索BFS(Breadth First Search)
一、之前所学的二叉树层序遍历就是一种广度优先搜索
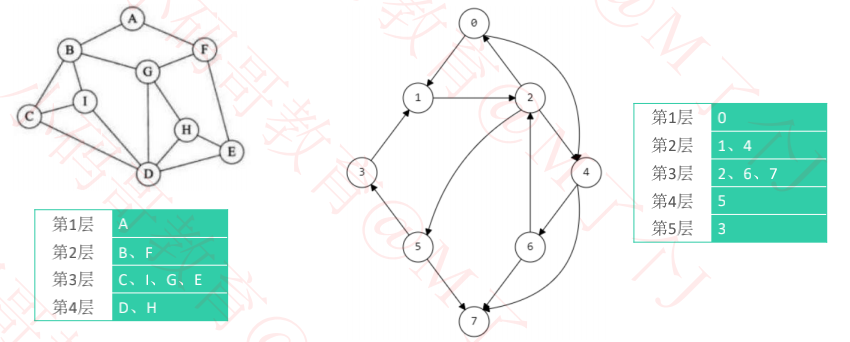
二、分层
与某点直接相连的点,位于该点的下一层。
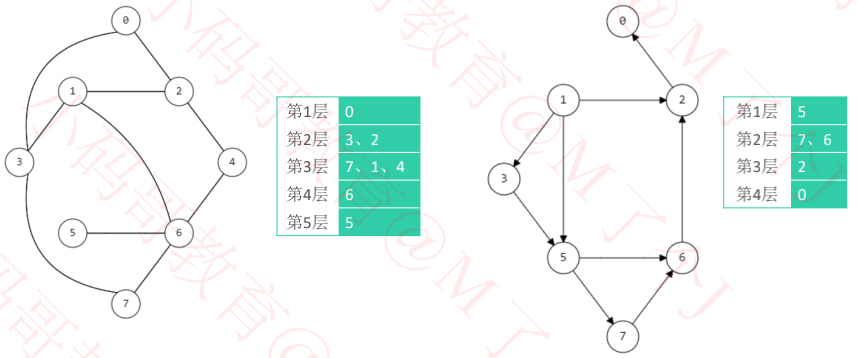
广度优先搜索,因为起始点的不同,遍历结果有所不同。同时也不能保证将每一个点都遍历到
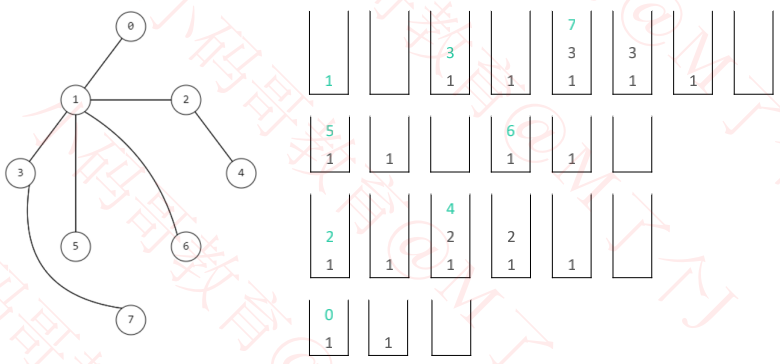
三、广度优先搜索思路
四、广度优先搜索-实现
/// 宽度优先搜索
/// @param begin 起始顶点
/// @param vistor 访问器
-(void)bfs:(id)begin Vistor:(Vistor)vistor{
if (!vistor) return;
LCVertex* beginVertex = [self __verticsGetKey:begin];
if (beginVertex == nil) return;
BOOL stop = false;
//存放已经访问过的顶点,避免重复访问
NSMutableSet * visitedVertics = [NSMutableSet set];
queue<LCVertex*>* vertexQueue = new queue<LCVertex*>();
vertexQueue->push(beginVertex);
while (vertexQueue->size()) {
LCVertex* vertex = vertexQueue->front();
vertexQueue->pop();
vistor(vertex.value,&stop);
if (stop) return;
[vertex.outEdges enumerateObjectsUsingBlock:^(LCEdge* _Nonnull obj, BOOL * _Nonnull stop) {
if(![visitedVertics containsObject:obj.to]){
vertexQueue->push(obj.to);
[visitedVertics addObject:obj.to];
}
}];
}
delete vertexQueue;
}
深度优先搜索DFS(Depth First Search)
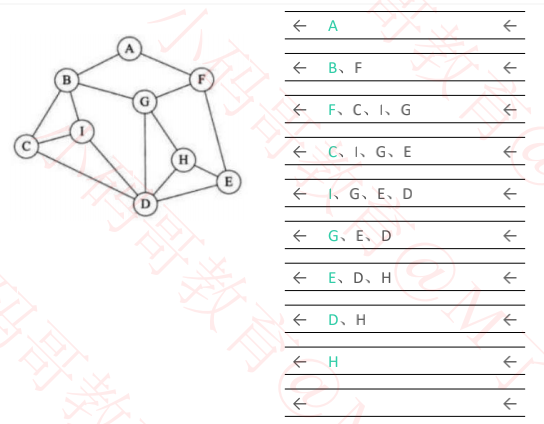
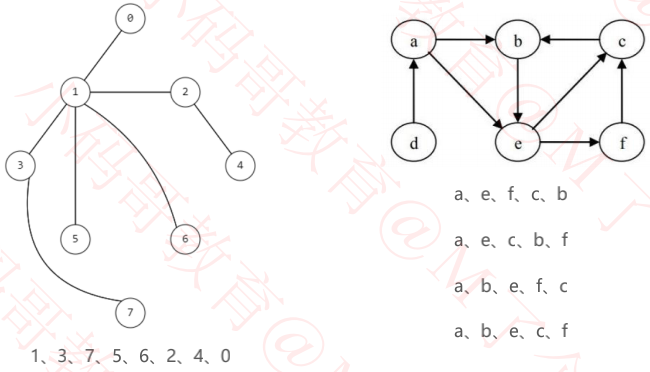
一、之前所学的二叉树前序遍历就是一种深度优先搜索
二、深度优先搜索递归实现
/// 深度优先搜索
/// @param begin 起始顶点
/// @param vistor 访问器
-(void)dfs2:(id)begin Vistor:(Vistor)vistor{
if (!vistor) return;
LCVertex* beginVertex = [self __verticsGetKey:begin];
if (beginVertex == nil) return;
BOOL stop = false;
[self __dfs:beginVertex
visitedVertices:[NSMutableSet set]
Vistor:(Vistor)vistor
stop:&stop];
}
-(void)__dfs:(LCVertex*)beginVertex
visitedVertices:(NSMutableSet*)visitedVertices
Vistor:(Vistor)vistor
stop:(BOOL*)stop{
[visitedVertices addObject:beginVertex];
vistor(beginVertex.value,stop);
if(*stop) return;
[beginVertex.outEdges enumerateObjectsUsingBlock:^(LCEdge* edge, BOOL * _Nonnull stop) {
if (![visitedVertices containsObject:edge.to]) {
[self __dfs:edge.to
visitedVertices:visitedVertices
Vistor:(Vistor)vistor
stop:stop];
}
}];
}
三、深度优先搜索非递归实现
/// 深度优先搜索
/// @param begin 起始顶点
/// @param vistor 访问器
-(void)dfs:(id)begin Vistor:(Vistor)vistor{
if (!vistor) return;
LCVertex* beginVertex = [self __verticsGetKey:begin];
if (beginVertex == nil) return;
__block BOOL outstop = false;
//存放已经访问过的顶点,避免重复访问
NSMutableSet * visitedVertics = [NSMutableSet set];
stack<LCVertex*>* vertexStack = new stack<LCVertex*>();
vertexStack->push(beginVertex);
[visitedVertics addObject:beginVertex];
vistor(beginVertex.value,&outstop);
if (outstop) return;
while (vertexStack->size()) {
LCVertex* vertex = vertexStack->top();
vertexStack->pop();
for (LCEdge*edge in vertex.outEdges) {
//如果已经遍历过,不再处理
if ([visitedVertics containsObject:edge.to]) continue;
vertexStack->push(edge.from);
vertexStack->push(edge.to);
[visitedVertics addObject:edge.to];
vistor(edge.to.value,&outstop);
if (outstop) return;
break;
}
}
delete vertexStack;
}
AOV网(Activity On Vertex Network)
一项大的工程常被分为多个小的子工程
子工程之间可能存在一定的先后顺序,即某些子工程必须在其他的一些子工程完成后才能开始
在现代化管理中,人们常用有向图来描述和分析一项工程的计划和实施过程,子工程被称为活动(Activity)
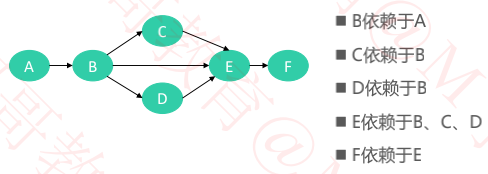
以顶点表示活动、有向边表示活动之间的先后关系,这样的图简称为 AOV 网
标准的AOV网必须是一个有向无环图(Directed Acyclic Graph,简称 DAG)
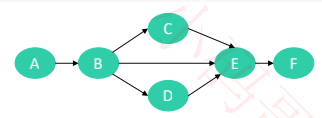
拓扑排序(Topological Sort)
一、拓扑排序介绍
前驱活动:有向边起点的活动称为终点的前驱活动,只有当一个活动的前驱全部都完成后,这个活动才能进行
后继活动:有向边终点的活动称为起点的后继活动
什么是拓扑排序?
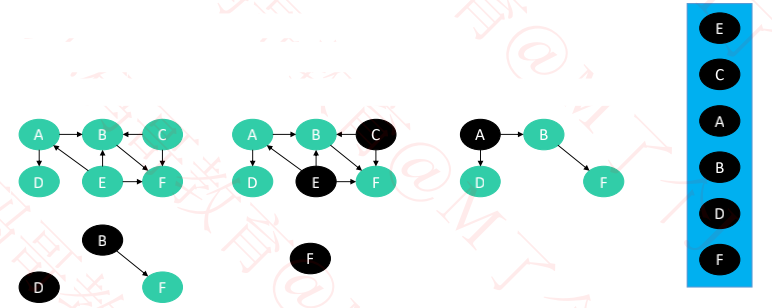
将 AOV 网中所有活动排成一个序列,使得每个活动的前驱活动都排在该活动的前面
比如上图的拓扑排序结果是:A、B、C、D、E、F 或者 A、B、D、C、E、F (结果并不一定是唯一的)
二、拓扑排序思路
可以使用卡恩算法(Kahn于1962年提出)完成拓扑排序
假设 L 是存放拓扑排序结果的列表
① 把所有入度为 0 的顶点放入 L 中,然后把这些顶点从图中去掉
② 重复操作 ①,直到找不到入度为 0 的顶点
如果此时 L 中的元素个数和顶点总数相同,说明拓扑排序完成
如果此时 L 中的元素个数少于顶点总数,说明原图中存在环,无法进行拓扑排序
三、拓扑排序实现
/// 拓扑排序
-(NSArray*)topologicalSort{
//存放最终的排序结果
NSMutableArray* sortArray = [NSMutableArray array];
//存放入度为0的顶点
queue<LCVertex*>* vertexQueue = new queue<LCVertex*>();
//存放顶点实时的入度值
map<LCVertex*,int>* inSizes = new map<LCVertex*, int>();
//初始化(将度为0的节点都放入队列)
[self.vertics enumerateKeysAndObjectsUsingBlock:^(NSString* key,LCVertex* vertex,BOOL*stop){
int inSize = (int)vertex.inEdges.count;
if (inSize == 0) {
vertexQueue->push(vertex);
}else{
inSizes->insert(pair<LCVertex*, int>(vertex, inSize));
}
}];
while (vertexQueue->size()) {
LCVertex* frontVertex = vertexQueue->front();
vertexQueue->pop();
//放入返回结果中
[sortArray addObject:frontVertex.value];
//通过入度值的变化来模拟删除
for (LCEdge*edge in frontVertex.outEdges) {
auto it = inSizes->find(edge.to);
int newSize = it->second-1;
if (newSize == 0) {
vertexQueue->push(edge.to);
}else{
//更改map的value
it->second = newSize;
}
}
}
delete vertexQueue;
delete inSizes;
return [sortArray copy];
}
行者常至,为者常成!